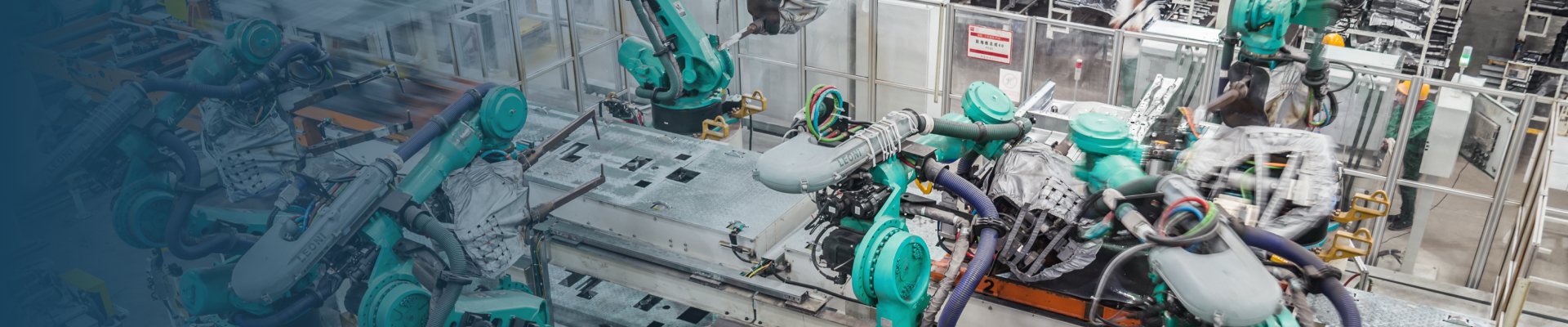

Project description: Project description: The project is a single station bevel loading and unloading project for customers. In this project, the robot completed a total of five steps of 3D camera recognition → grasping → secondary positioning → grasping → placing. This project solved the customer's on-site manpower and labor intensity problems, and increased the processing efficiency by more than 50%.